Dislocation Machines
See related publication in PNAS
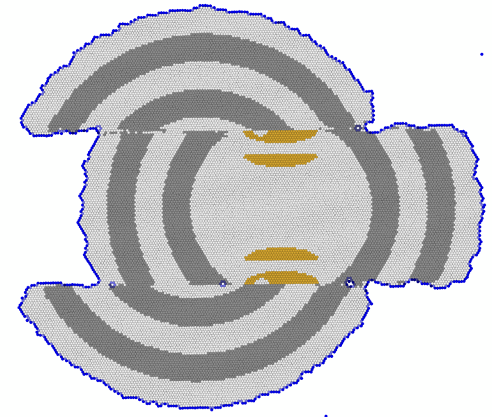
Crystalline materials deform by the creation and motion of topological defects known as dislocations. In this project, we examine how stresses could be applied to a small region of a 2D colloidal crystal to create and move dislocations that reshape a large domain.
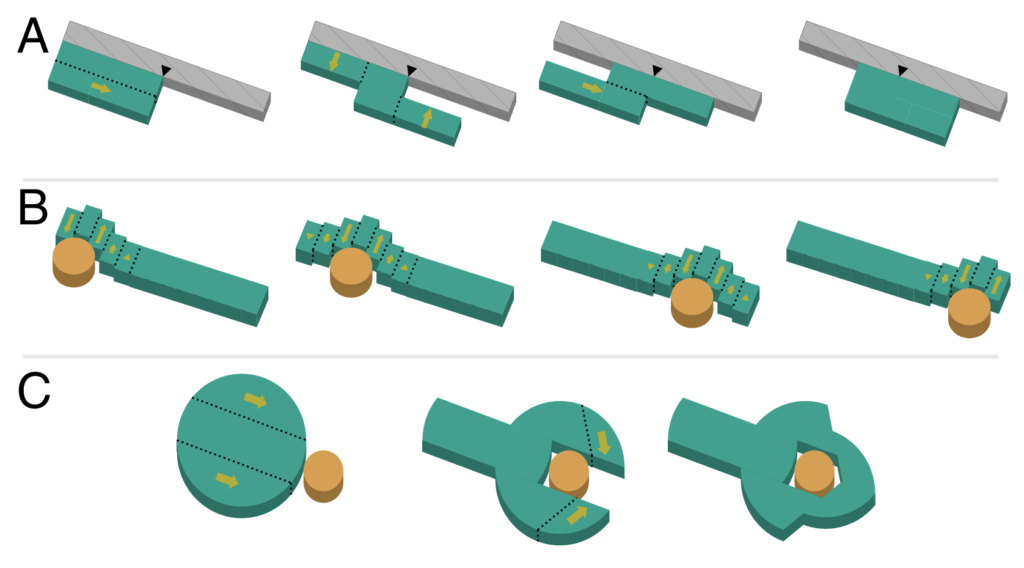
Imagine a robot collective made of so many individuals that we can treat it as a homogeneous material. In the image to the left, we envision some simple types of useful collective motion, (A) moving along a surface, (B) transporting an object by peristalsis, and (C) capturing an object. All these reshapings can be accomplished by introducing slip on a set of planes with the material. If the collective is densely packed and crystalline, we can exploit the useful properties of dislocations to arbitrarily control slip on lattice planes.
In this video, we show how local deformations can cause the nucleation of a dislocation pair. If this pair can be separated, then the glide plane they travel on will accumulate one Burgers vector of slip.
In this video, we show how repeatedly cycling local strains caused by a swelling and shrinking particle cluster builds up slip along the glide boundary in a large domain.